The Caterpillar
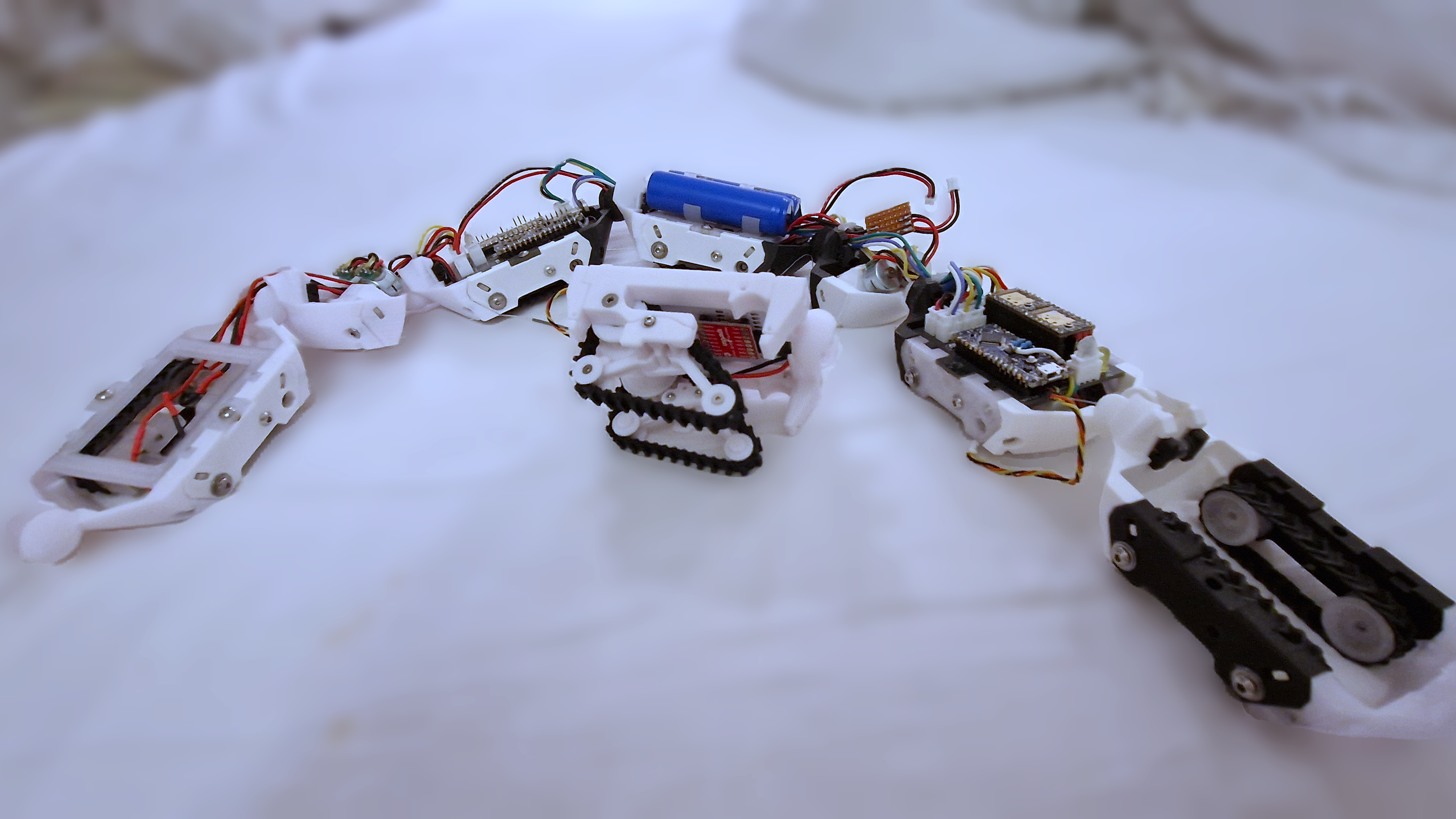
Flying up to the tree canopy level is undeniably very simple, but getting into the tree canopy is very difficult. Climbing the tree from its trunk avoids this problem. I created a tracked climbing robot which grips onto the tree trunk then spirals up to the tree top.
The robot is modular. A quick attachment mechanism allows multiple repeating units to connect together, giving the robot a greater length to climb thicker trees. A custom proprioception algorithm enables each unit to sense its own position within the chain and acts to commands accordingly.