The Sloth
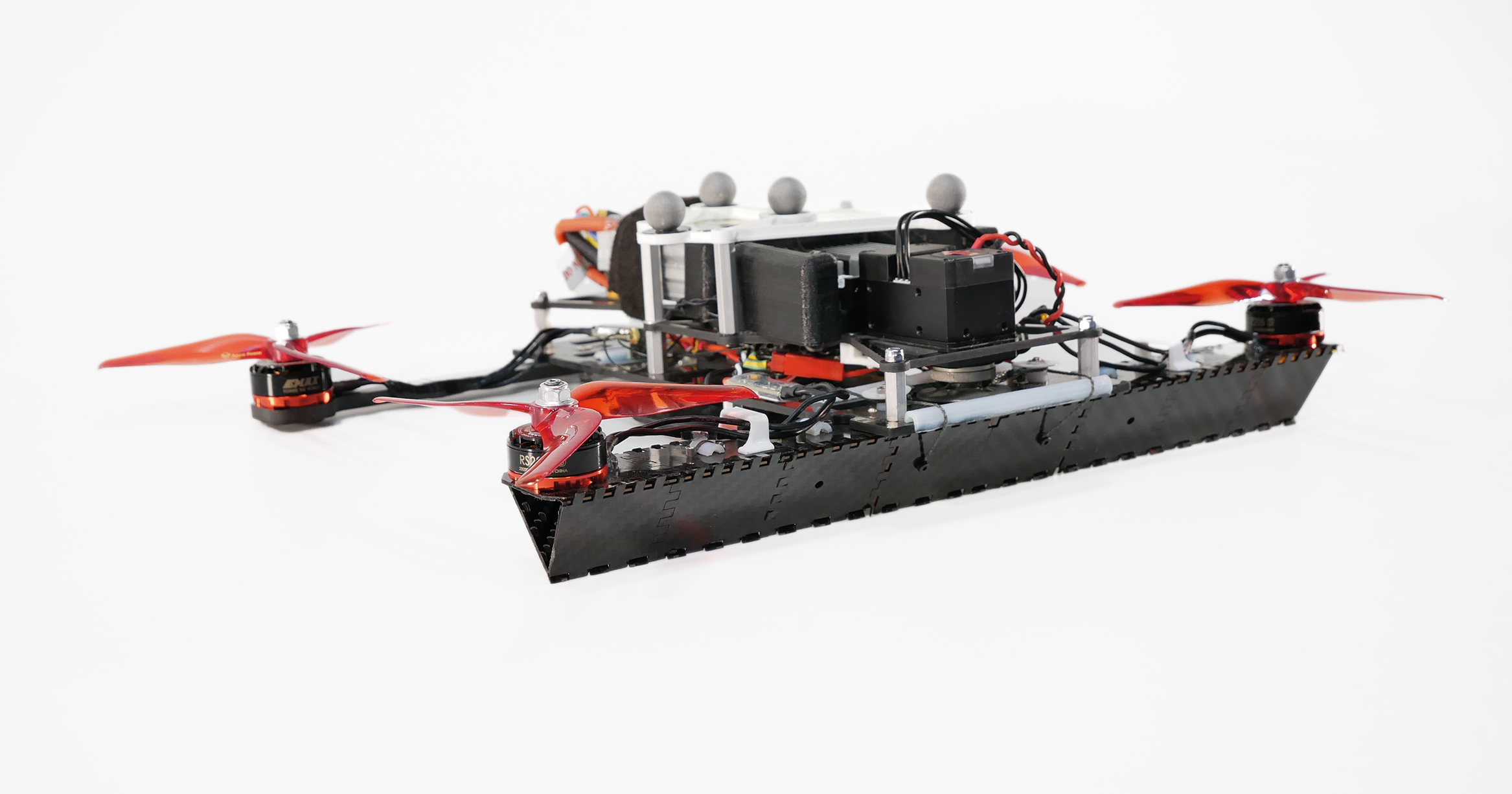
Metamorphic Perching Quadrotor
"The Sloth" is a venture into adopting an animal's behavioral strategy into the design and mission of a robot. The study of animal biomechanics has spawned many capable mechanical designs, but the strategy each animal deploys to thrive in their environment is equally significant. I combined a power-hungry quadcopter with the sloth's unwillingness to move to imagine what a lazy ultra-energy-conservative flying machine should be.
The core innovation from the Sloth project is the morphing flying-perching quadcopter arm. The technical challenge of this robot arm is to maintain airworthiness while maximizing perching performance and perching energy efficiency. A major design direction is how to engineer within this triangular cost-benefit relationship and how to innovate beyond it.
This project is published as:
Zheng, P., Xiao, F., Nguyen, P. H., Farinha, A., & Kovac, M. (2023). Metamorphic aerial robot capable of mid-air shape morphing for rapid perching. Scientific Reports, 13(1), 1297.